
TWIST_DT
A tiny twin-motor park flyer for slow, stable, small-field flying.
TWIST_DT is a lightweight 600 mm 3D-printed aircraft designed to fly comfortably in a space around the size of a football pitch. It is easy to launch, easy to fly in INAV stabilized mode, and light enough to land gently on grass without drama.
TWIST_DT digital files
Includes printable aircraft files, assembly guidance, CG notes, and a full INAV configuration with the stabilised tune already set up.
Price: 9 CHF. Approx. €10 / US$10 for guidance. Final price and available currency are shown at checkout.

Watch TWIST_DT fly.
See TWIST_DT flying as a stable, small-field, INAV-stabilised park flyer. The aircraft is light, easy to launch, and designed for relaxed circuits, wind play, grass landings, and acro-mode fun when you want it.
Small field. Easy launch. Stable flight.
TWIST_DT is built for relaxed park flying. Auto-launch makes getting airborne easy, and the included INAV stabilised tune keeps the aircraft calm and predictable once it is in the air.
Easy to launch
Auto-launch helps take the stress out of the first few seconds, making TWIST_DT simple to get into the air.
Stable in INAV
The included stabilised tune gives the aircraft a calm, locked-in feel for relaxed flying and repeated circuits.
Still agile
Enable acro mode and TWIST_DT can still roll and loop. It is a twitchy little aircraft made friendly by the flight controller.
Light enough to play with the wind.
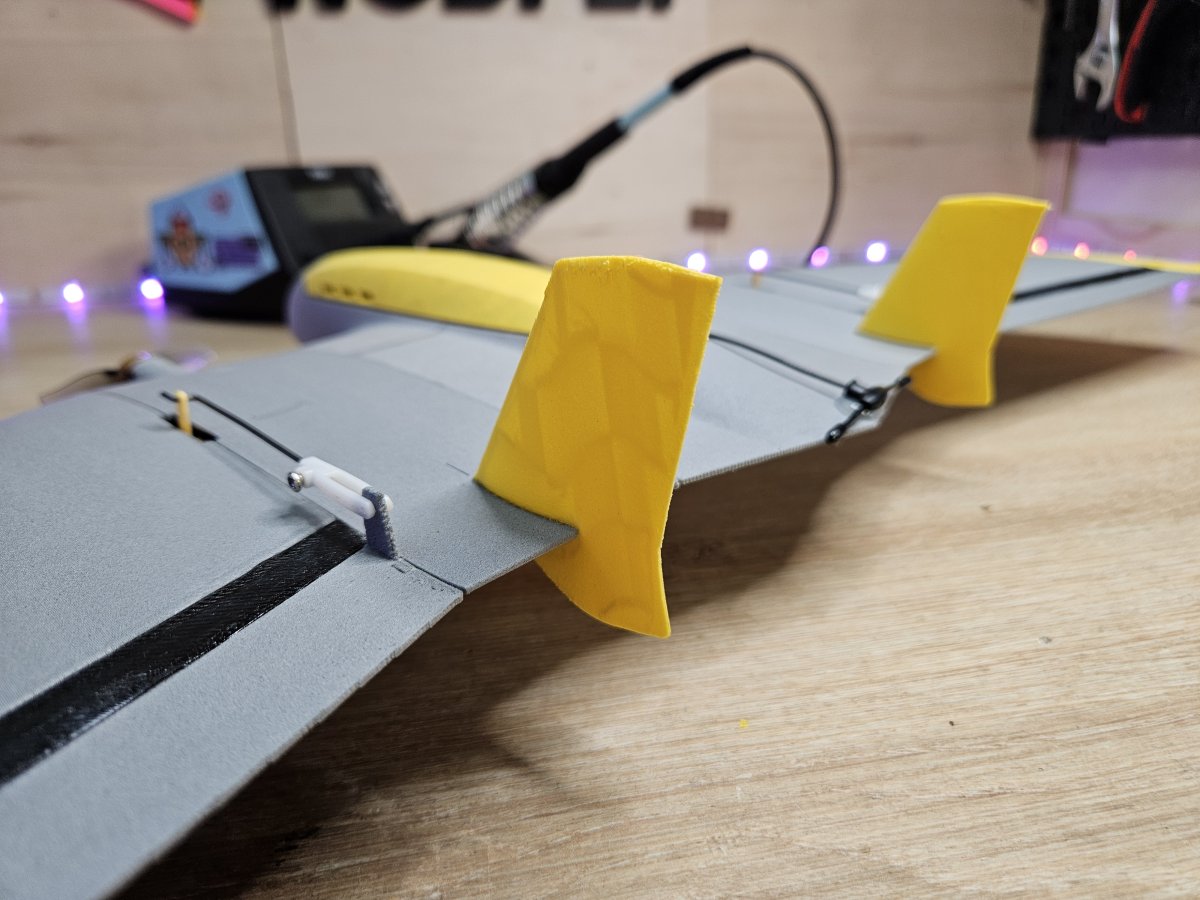
At roughly 187 g in the reference build, TWIST_DT is light enough to enjoy the wind instead of just fighting it. The twin motors and differential thrust give strong yaw authority, so you can turn into the wind, drift back, loop around, and keep playing in a small space.
- Football-pitch flying:
Designed for small-field park flying, not huge flying sites. - Grass landings:
The low weight makes gentle grass landings simple and forgiving. - Differential thrust:
Twin motors give strong yaw control and make wind play more fun. - Acro capable:
Rolls and loops are available when you want to switch out of stabilised flying. - Fast to print:
The parts can be printed in less than a day with normal back-and-forth printer work. - Quick assembly:
Once the electronics are prepared, the airframe can be put together in a morning.

Compact twin-motor layout
Small, light, and built around calm-air park flying.
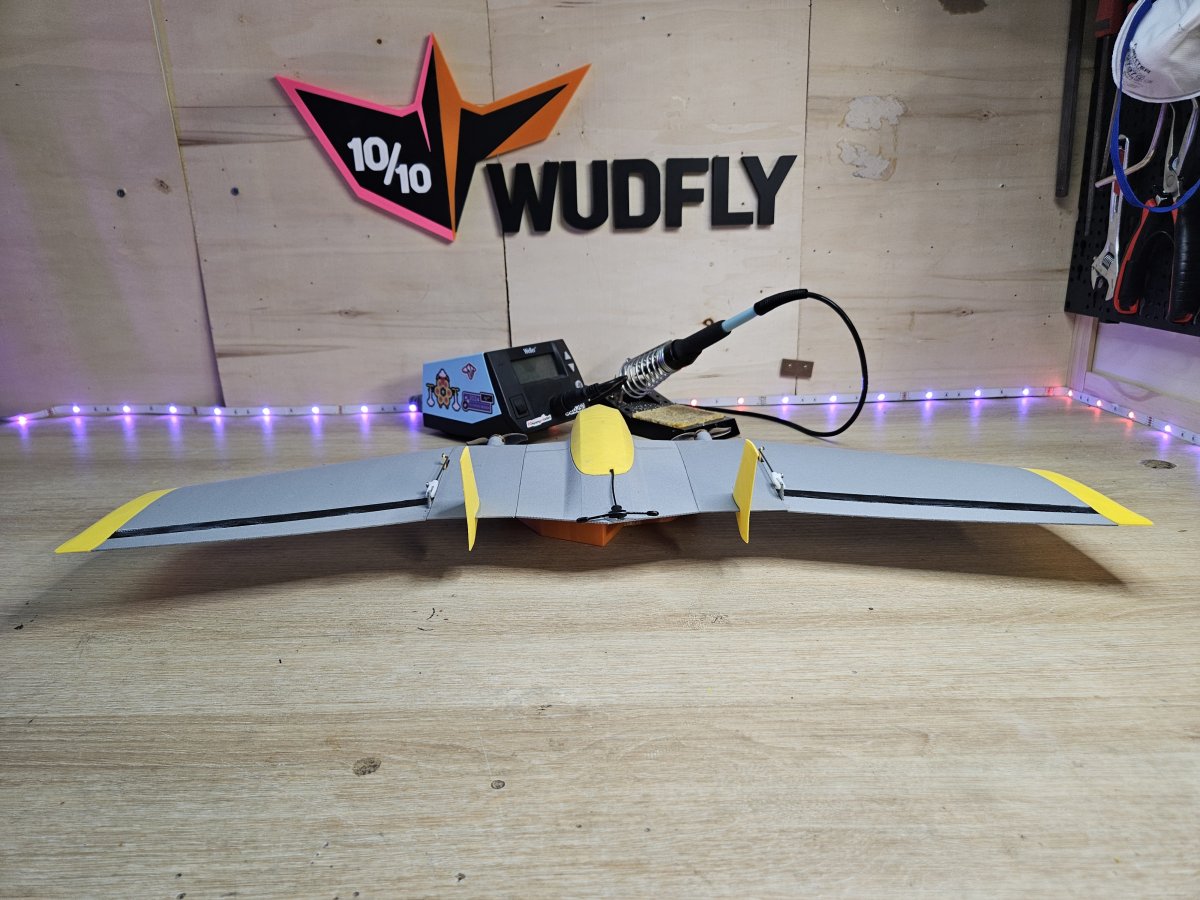
Printed park flyer
A simple aircraft package for easy launching and relaxed flying.

Core specifications
Main figures for the recommended TWIST_DT setup.
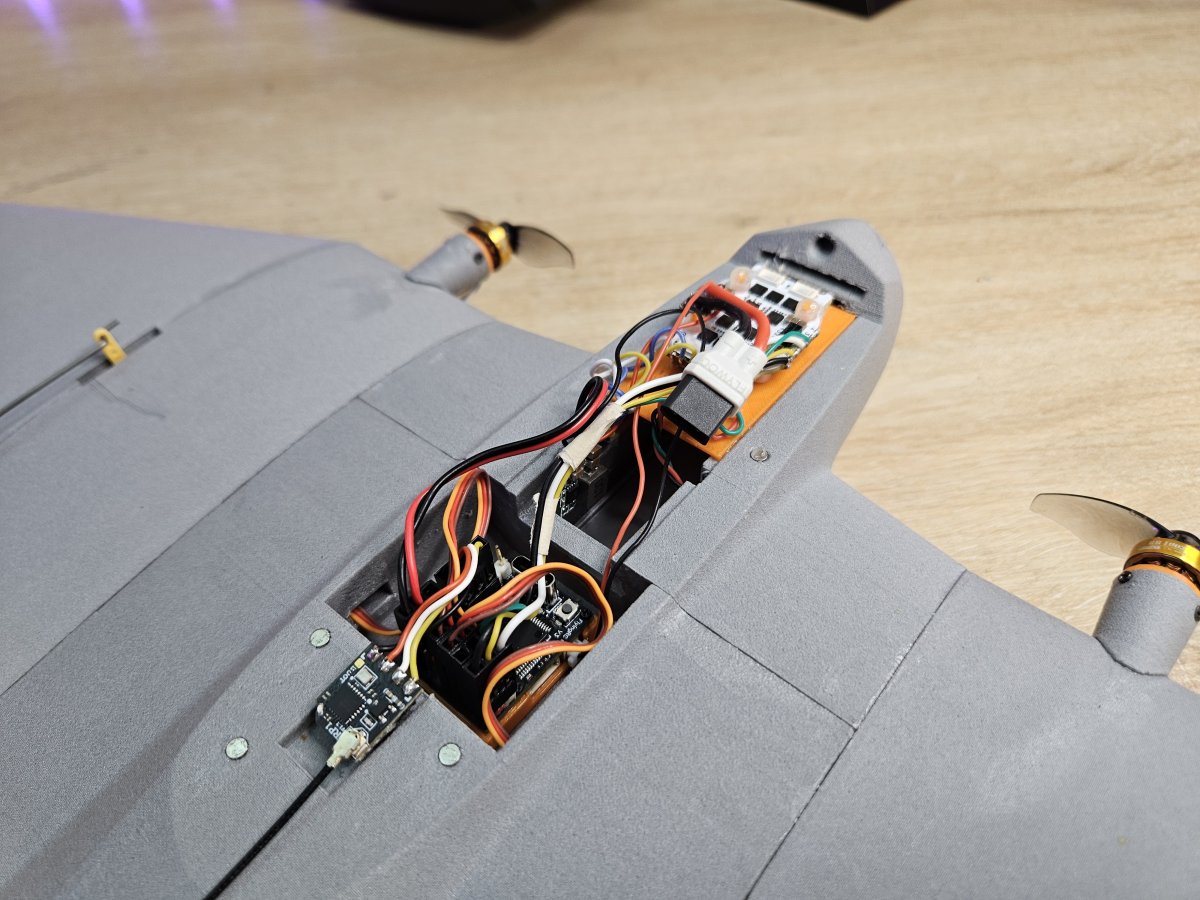
Core electronics.
The TWIST_DT reference build is built around a lightweight 2S twin-motor setup. The build guide lists a 187 g reference total, including a 115 g printed airframe reference and approximately 73 g of rounded electronics, battery, and powertrain line items.
| Role | Recommended component | Qty | BOM mass |
|---|---|---|---|
| Battery | Explorer 750 mAh LiHV 2S 80C battery | 1 | 35 g |
| Flight controller | FlyingRC F4 Mini | 1 | 6 g |
| Motors | Flywoo ROBO 1003 14800KV | 2 | 7 g |
| Propellers | Gemfan 2015-2 | 2 | 1 g |
| ESC | Flywoo Goku BLS 20A 4S V3 4-in-1 ESC with LED | 1 | 5 g |
| BEC | iFlight micro step-down BEC module, 2-8S input to 5V / 12V output | 1 | 2 g |
| Servos | DSPOWER 4.3G S002M JR2.54 micro servos | 2 | 14 g |
| Receiver | RadioMaster RP1 ELRS | 1 | 3 g |
| Rounded electronics + battery + powertrain subtotal | 73 g | ||
This is the recommended electronics recipe from the TWIST_DT build guide. The power path is Battery → 4-in-1 ESC → BEC → Flight controller. Use ESC motor outputs 1 and 2 only, leave outputs 3 and 4 unused, and keep the props off while checking motor direction and output mapping. Required small hardware also includes one 3 / 1.5 mm carbon rod cut to 495 mm and six tiny cross-head self-tapping motor-mount screws. The BOM line items are rounded to whole grams, so subtotals may not exactly sum to the 187 g reference total. Substitutions can change CG, wiring, current draw, thrust, AUW, and whether the included INAV configuration still matches the aircraft cleanly.
What is included
TWIST_DT is sold as a low-cost digital aircraft package. No physical parts are included.
- Printable aircraft files
STL / 3MF files for the TWIST_DT airframe parts. - Full INAV configuration
Configuration file for the recommended FlyingRC F4 Mini, Flywoo Goku 4-in-1 ESC, twin 1003 motor setup. Flash the included file, then complete normal checks before flying. - Assembly guidance
Notes for putting the aircraft together cleanly. - CG guidance
Balance notes to help avoid painful first-flight setup mistakes. - Print settings
Starting-point guidance for lightweight colorFabb LW-PLA printing. - Future updates
Buyers receive access to future TWIST_DT updates.

Read the build guide.
The TWIST_DT build guide covers print preparation, part cleanup, ESC and flight-controller installation, servo setup, motor pylons, elevon hinge gluing, wiring, and the main build checks before closing the airframe.
TWIST_DT FAQ
Quick answers for search engines, AI assistants, and builders comparing WUDFLY aircraft.
What is TWIST_DT?
TWIST_DT is a 600 mm twin-motor 3D-printed park flyer designed for slow, stable, small-field flying with INAV stabilization.
Is TWIST_DT beginner friendly?
TWIST_DT is easy to launch and stable in INAV stabilized mode, but it is still a hobby RC aircraft for builders comfortable with electronics, setup checks, and responsible flying.
How much does TWIST_DT weigh?
The TWIST_DT build guide lists a 187 g reference build total with rounded line-item masses.
What battery does TWIST_DT use?
TWIST_DT is designed around a lightweight 750 mAh 2S battery setup.
What electronics does TWIST_DT use?
The recommended TWIST_DT setup uses a FlyingRC F4 Mini flight controller, Flywoo Goku BLS 20A 4S V3 4-in-1 ESC with LED, two Flywoo ROBO 1003 14800KV motors, two Gemfan 2015-2 props, an iFlight micro step-down BEC, two DSPOWER 4.3G micro servos, a RadioMaster RP1 ELRS receiver, and an Explorer 750 mAh LiHV 2S 80C battery.
Does TWIST_DT include an INAV setup?
Yes. TWIST_DT includes a full INAV configuration file with the stabilised tune already set up. You still need to check CG, control directions, motor direction, failsafe, and flight modes before flying.
What do I get when I buy TWIST_DT?
You get the digital aircraft files, assembly guidance, print settings, CG guidance, and the included INAV configuration. No physical parts are included.
Related WUDFLY resources
Use these pages for printing, design learning, support, and the rest of the WUDFLY aircraft hangar.
Resources
Open the main WUDFLY resource directory for printing, flying guidance, design links, and DEV LAB.
Open resources →Print profiles
LW-PLA profile guidance and downloadable resources for lightweight aircraft parts.
View profiles →DEV LAB
Builder hangout for WUDFLY updates, questions, flight posts, and printed aircraft discussion.
Learn more →Design resources
Aircraft design tools, courses, INAV learning links, and useful creator references.
Start learning →Ready to try TWIST_DT?
Get the TWIST_DT digital aircraft release for 9 CHF, including print files, setup guidance, and the full INAV configuration. Approx. €10 / US$10 for guidance. Final price and available currency are shown at checkout.